📝The Maker's Guide to Muscle: Choosing the Right Motor for Your Next Robot
So, you’ve got your microcontroller wired up, your chassis 3D printed, and your coffee mug empty. You’re ready to bring your robot to life! But before your creation can roam the living room or grab a soda from the fridge, it needs muscles. In the world of mechatronics and robotics, those muscles are MOTORS.
🤖 The Maker's Guide to Muscle: Choosing the Right Motor for Your Next Robot
So, you’ve got your microcontroller wired up, your chassis 3D printed, and your coffee mug empty. You’re ready to bring your robot to life! But before your creation can roam the living room or grab a soda from the fridge, it needs muscles.
In the world of mechatronics and robotics, those muscles are motors.
Walk into any electronics shop or browse online, and you'll be hit with a dizzying array of options.
- Should you use a DC motor?
- A servo?
- What on earth is a stepper?
In this guide, we’ll break down the big three motor types every robotics enthusiast needs in their toolkit, exactly how they work, and when to use them.
⚙️ 1. DC Gearmotors: The Workhorses
A typical DC Gearmotor setup with a brushed motor and attached gearbox.

When you think of a standard, spinning motor, you’re thinking of a Direct Current (DC) motor. You apply voltage, and it spins. Reverse the polarity, and it spins the other way.
By themselves, standard DC motors spin incredibly fast but have very little torque (turning force). If you attach a wheel directly to a bare DC motor, it probably won't even be able to move your robot's weight.
That’s why in robotics, we almost always use DC Gearmotors — DC motors paired with a gearbox that reduces speed but massively increases torque.

🛠️ Best For
- Drive Systems: Powering the wheels or tracks of a rover
- Continuous Rotation: Anything that needs to spin endlessly, like a fan or a spinning radar mount
⚠️ The Catch
They are "dumb" motors. Without adding external sensors (like rotary encoders), the motor doesn't know how fast it's spinning or how many times it has turned.
🎯 2. Servo Motors: The Precision Masters
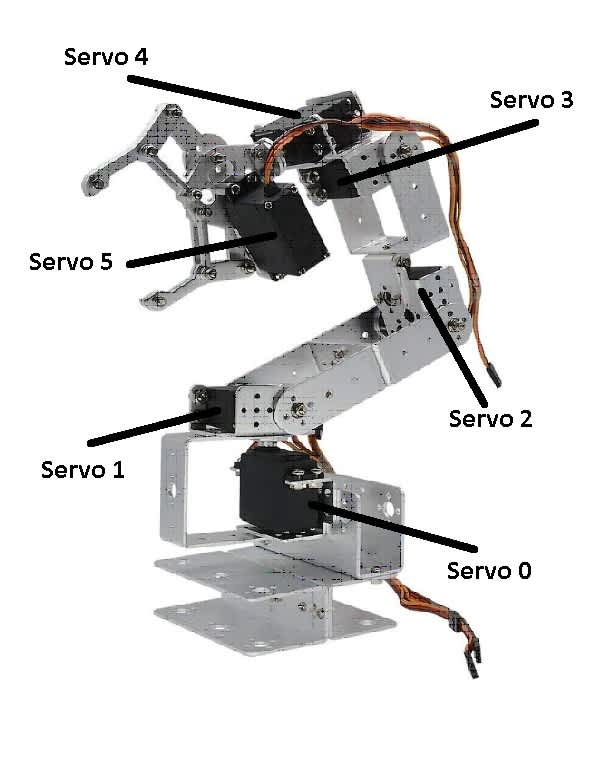
Inside a servo: a DC motor, gear train, potentiometer, and control board.
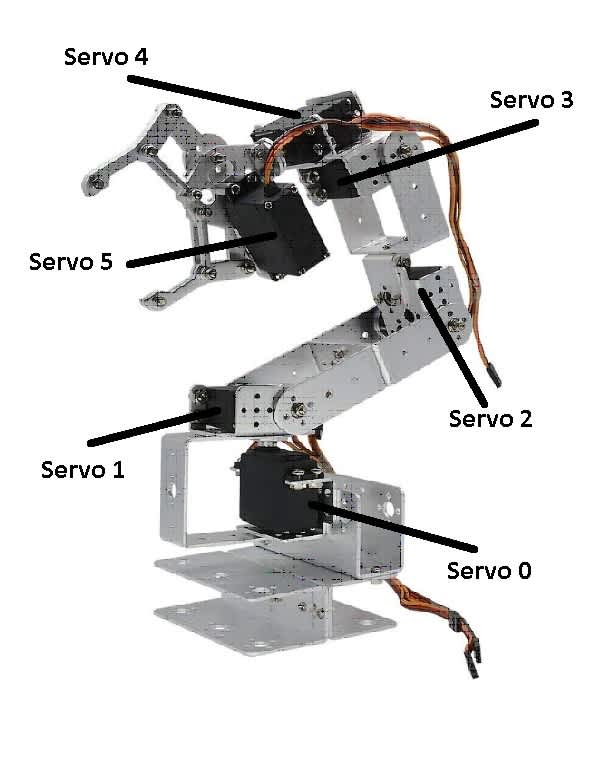
If DC motors are the legs of your robot, servo motors are the joints. Servos are essentially a DC motor, a gear train, a potentiometer, and a control circuit — all packed into one neat little box.
Instead of spinning continuously, standard servos are told to move to a specific angle (usually between 0 and 180°) and hold that position. You control them by sending a PWM (Pulse Width Modulation) signal from your Arduino, Raspberry Pi, or dedicated servo controller.
🛠️ Best For
- Robot Arms: Moving joints to exact angles
- Steering: Controlling the front wheels of an RC car
- Grippers: Opening and closing claws with precision
- Camera Pan/Tilt Systems: Looking around a room
⚠️ The Catch
Standard servos cannot rotate a full 360°. (Note: You can buy “continuous rotation servos,” but those act more like controllable DC motors and lose exact positional awareness.)
📏 3. Stepper Motors: The Step-by-Step Planners
Stepper motors use toothed electromagnets to rotate in exact, discrete steps.

Stepper motors are the meticulous planners of the motor world. Instead of rotating smoothly like a DC motor, steppers rotate in discrete, tiny increments called steps.
A common NEMA 17 stepper motor, for example, takes 200 individual steps to complete one full 360° rotation — that’s exactly 1.8° per step.
Because you can tell the motor to move exactly 50 steps forward and 20 steps back, you get incredible control over its position and speed without needing complex external sensors.
They also have excellent holding torque, meaning they resist being turned when actively stopped.
🛠️ Best For
- 3D Printers & CNC Machines: Where sub-millimeter precision is required to build parts
- Camera Sliders: For perfectly smooth, repeatable timelapse movements
- Precise Linear Motion: Driving lead screws or timing belts
⚠️ The Catch
They draw a lot of current (even when sitting still to maintain holding torque), can get quite hot, and require specialized stepper driver boards (like the A4988 or TMC2209) to work properly.
🆚 Quick Comparison Cheat Sheet
| Feature | DC Gearmotor | Hobby Servo | Stepper Motor |
|---|---|---|---|
| Rotation | Continuous | Usually 0–180° | Continuous (in steps) |
| Precision | Low (unless with encoders) | High (positional) | Very High (incremental) |
| Control Difficulty | Easy (just apply power) | Easy (PWM signal) | Medium (requires step driver) |
| Common Use | Wheels, continuous spinning | Joints, steering, claws | 3D printers, CNC, precise rails |
🚀 Ready to Start Building?
If you’re ready to pick up some hardware and start tinkering, here are a few recommended spots for makers to source quality motors and controllers:
- Adafruit Industries – Fantastic selection of hobby motors with incredible documentation and tutorials.
- Pololu Robotics – The holy grail for micro metal gearmotors and motor drivers.
- SparkFun Electronics – Great kits, breakout boards, and enthusiast-grade hardware.
⚡ Pro Tip: Always double-check your motor’s voltage and stall current ratings before connecting them to a power supply or motor driver — to avoid letting out the "magic blue smoke!"